
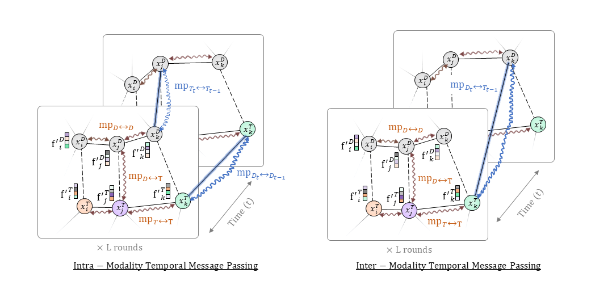
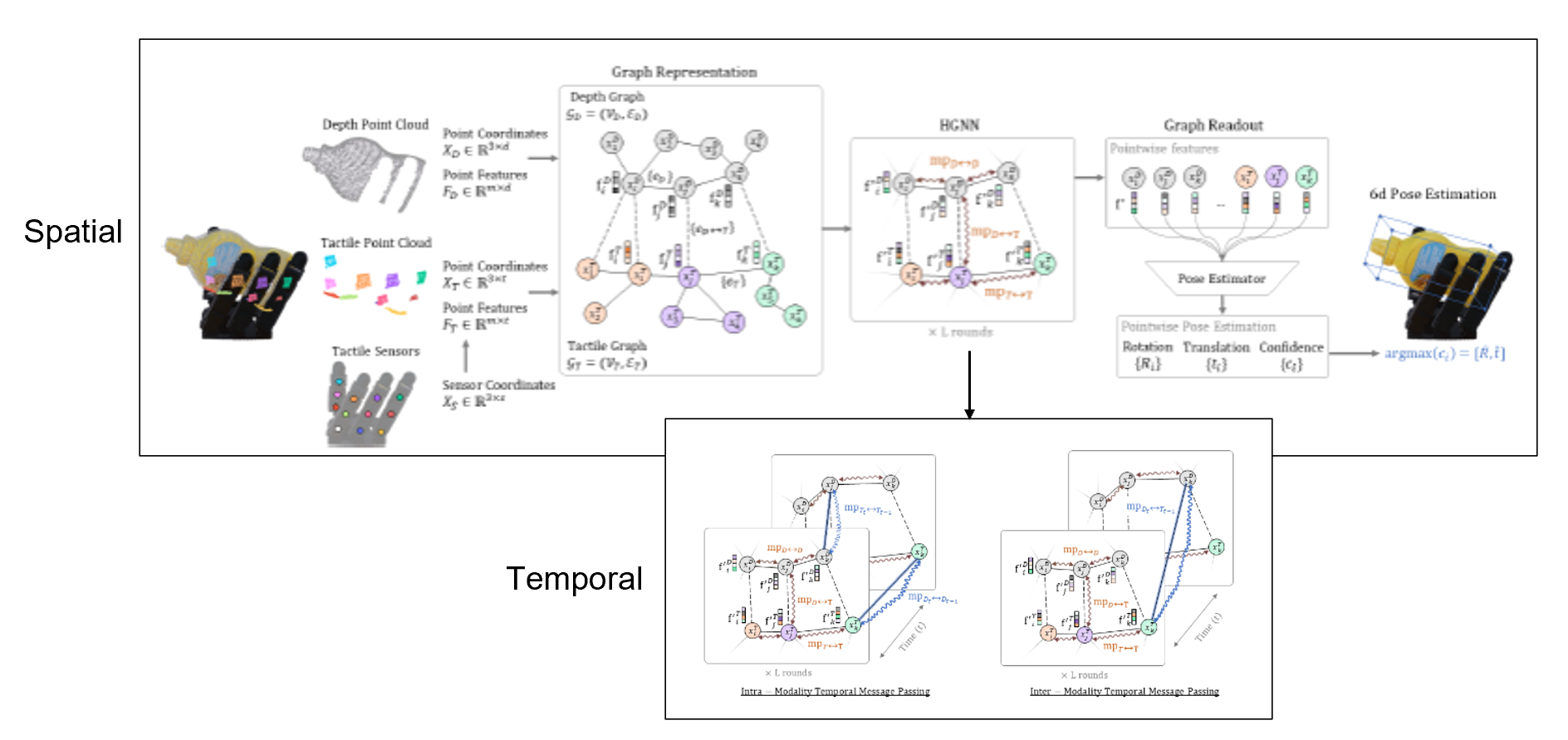
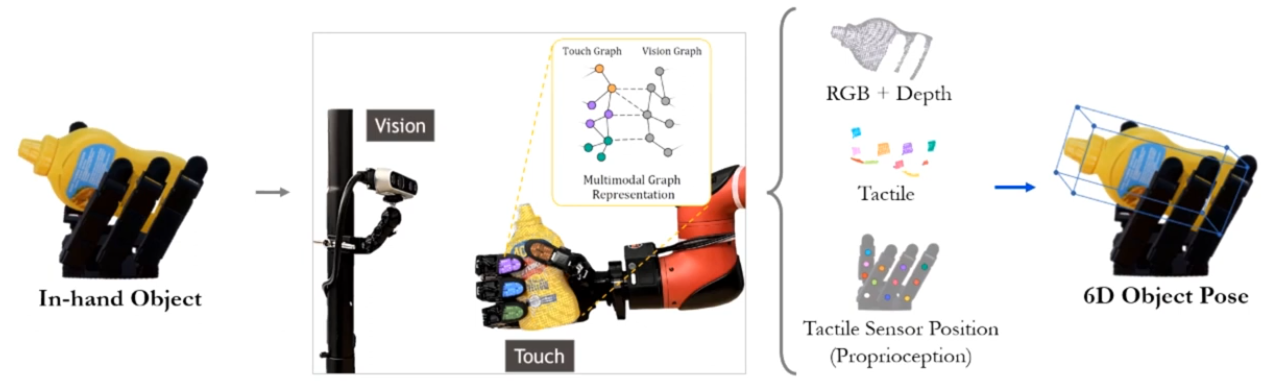
DynastGNN: Dynamic Spatio-Temporal Hierarchical Graph Neural Network for Visuotactile 6D Pose Estimation of an In-Hand Object
Snehal Dikhale, et al.
Paper in Progress, 2025
Robotics Researcher @ Honda Research Institute
The industry has mastered seeing. I want to give robots the ability to truly feel. That means cracking tactile representation and using it to unlock dexterous manipulation.
Right now I'm extending Vision-Language-Action architectures with touch, connecting foundation models all the way down to real hardware.
I'm equal parts researcher and engineer. I love building ideas that survive contact with the real world. I call it hardware intuition.
Researcher by Nature, Engineer by Practice
Simulation
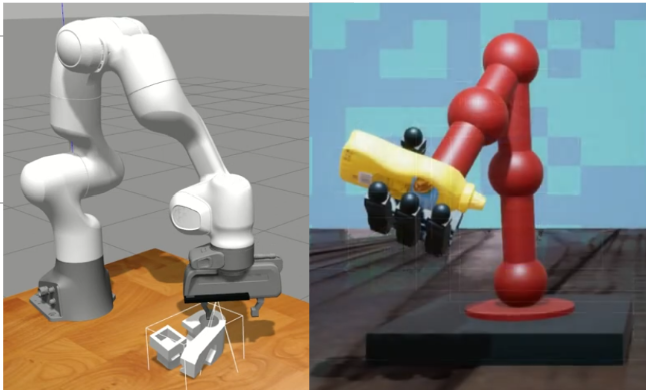
High-fidelity physics modeling
Domain randomization
Sim-to-real transfer
Algorithm
Tactile foundation encoders
Tactile VLM/VLA
Spatio-temporal GNNs
Hardware
Real-world deployment
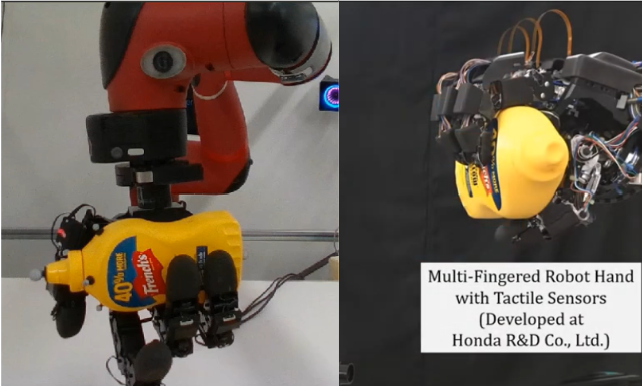
Tactile sensor integration
Multi-fingered manipulation
Honda Research Institute · Apr 2024 – Present
25%
300k+
6
Honda Research Institute · Sep 2020 – Apr 2024
65%
3×
100+
Worcester Polytechnic Institute · 2018 – 2020
78%
3.8
4
Snehal Dikhale, et al.
Paper in Progress, 2025
Research & AI
Software & Frameworks
Simulation & Tools
A personal essay on what it really means to build a career in robotics — the doubt, the obsession, the hardware that breaks at 11pm, and why I'd choose it all over again.
Read on Medium